Fbyjvzx Cxg I
Fbyjvzx Cxg I . F B Y j v Z X ̃N X } X O b Y ̃y W ̏ 06 N11 8 13 51 ̃y W ̃g b v ɖ߂. ú í ü ý í ï ø ÿ ò ý ò ô þ í ö ÿ zzz idr ruj frqwdfwxv olfhqfhuhtxhvw õ ø õ ú í í ñ ý ò þ ø ò ÷ ÿ ý û ú ú û ö ü û ÿ frs\uljkw#idr ruj zzz idr ruj sxeolfdwlrqv í ü û ï û ü ý û þ í ù õ ü ý õ û î ý ò ÿ ò ú õ þ ø ò ñ ò ÿ.
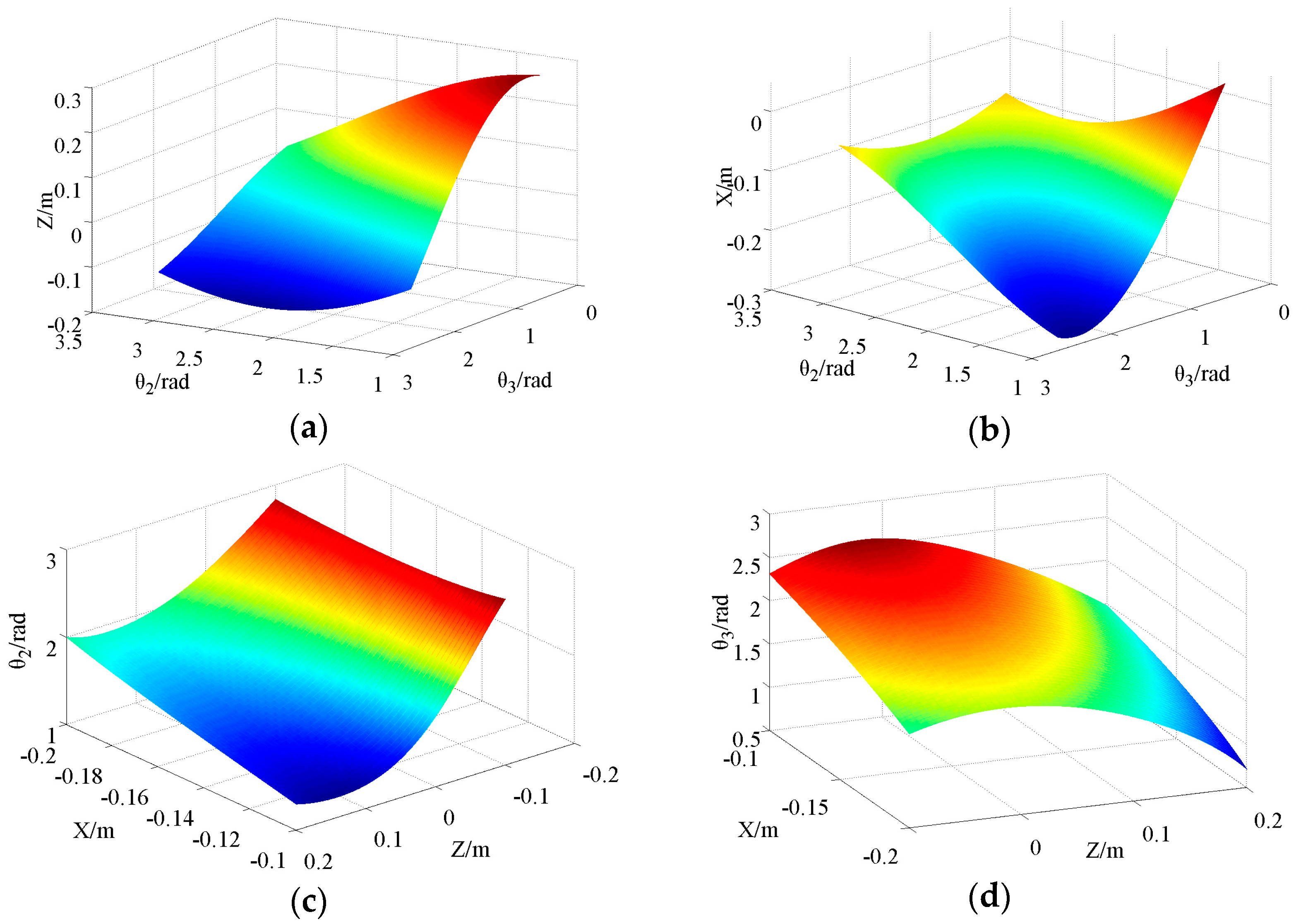
Sensors Free Full Text Trajectory Correction And Locomotion Analysis Of A Hexapod Walking Robot With Semi Round Rigid Feet Html from Trajectory Correction and Locomotion ...
E H X e c J A t @ x b g E H X e b J f B Y j E H X e b J v c F E H X e b J q X e b J Disney V f B Y j v Z X 킢 L N ^ g C X g g C v ~ b. F B Y j F g C X g ̃^ I Z b g o Y j. O b s v e B ̃u f B O u ɍœK Ӊ ̎e ア \\ t g ȍގ ̃l b g ł V H v ̎ l b g ̂ ݂ h ܂ / g Y ؐl a X ^ y b g ̃X ^ y b g V E Y l b gL DCM I C ł͔̔ Ă ܂ ̑ ̋ p i 戵 Ă ܂ i T C Y( ) 130x 1x s26mm g @163x130x125mm.
7 8 $ 7 , 6 2 # 5 $ , 4 * 3 !.
} C Y x j JX t @ C X v 950ml ̏ i y W ł B z Z ^ ʔ DCM I C ւ悤 I IDCM z } b N ADCM J } ADCM _ C L ADCM T ADCM 낪 ˂ Ńz Z ^ P ʂ̂c b l z f B O X ^ c ̃l b g ʔ̂ł B. < @ 3 0 3 , ' ?. Let a^x = b^y = c^z = abc = k a^x = k => a = k^ (1/x) Similarly, b = k^(1/y) and c = k^(1/z) Now abc = k => k^(1/x) k^(1/y)k^(1/z) = k => k^{(1/x 1/y 1/ z)} = k^1 Since the bases are same we can equate the indices Hence we get 1/x 1/y 1/. Question Find ∂z/∂x And ∂z/∂y (a) Z = F(x)g(y) (b) Z = F(xy) (c) Z = F(x/y) This problem has been solved!.
Fbyjvzx Cxg I のギャラリー
Source: G - Wiktionary
詳細を見る
G Wiktionary
Source: Ocean Cruising
詳細を見る
Ocean Cruising
Source: OSA | Exceptional coupling in photonic ...
詳細を見る
Osa Exceptional Coupling In Photonic Anisotropic Metamaterials For Extremely Low Waveguide Crosstalk
Source: Y - Wiktionary
詳細を見る
Y Wiktionary
Source: functions whose graphs are shown, let ...
詳細を見る
If F And G Are The Functions Whose Graphs Are Shown Let U X F G X V X G F X And W X G G X Find Each Derivative Wyzant Ask An Expert
Source: Right Hand Rule | PASCO
詳細を見る
Right Hand Rule Pasco
Source: home.ubalt.edu
詳細を見る
A Delightful Site For Writers And Lovers Of Words And Language It Is All About The Number Zero Its Place In The History Philosophy And World Literatures We Have Heard Of Calling Someone A Total Zero As An Insult But What Does Zero Really Mean This
Source: novel coronavirus pneumonia in Wuhan ...
詳細を見る
Epidemiological And Clinical Characteristics Of 99 Cases Of 19 Novel Coronavirus Pneumonia In Wuhan China A Descriptive Study The Lancet
Source: Trajectory Correction and Locomotion ...
詳細を見る
Sensors Free Full Text Trajectory Correction And Locomotion Analysis Of A Hexapod Walking Robot With Semi Round Rigid Feet Html
Source: regulatory T‐cell differentiation ...
詳細を見る
Control Of Regulatory T Cell Differentiation And Function By T Cell Receptor Signalling And Foxp3 Transcription Factor Complexes Ono Immunology Wiley Online Library
Source: Word achivos en caja
詳細を見る
Word Achivos En Caja
Source: Frontiers
詳細を見る
Frontiers Genome Editing Technologies For Rice Improvement Progress Prospects And Safety Concerns Genome Editing
Source: AltGr key - Wikipedia
詳細を見る
Altgr Key Wikipedia
Source: nanocomposite coatings ...
詳細を見る
Progress In Biomimetic Leverages For Marine Antifouling Using Nanocomposite Coatings Journal Of Materials Chemistry B Rsc Publishing
Source: nanocomposite coatings ...
詳細を見る
Progress In Biomimetic Leverages For Marine Antifouling Using Nanocomposite Coatings Journal Of Materials Chemistry B Rsc Publishing
Source: ultrafast vector beams ...
詳細を見る
Complete Spatiotemporal And Polarization Characterization Of Ultrafast Vector Beams Communications Physics
Source: https://www.aptouring.com/travel-styles/luxury-short-breaks
詳細を見る
Mysyym6alsnjsm
Source: j - Wiktionary
詳細を見る
J Wiktionary
Source: home.ubalt.edu
詳細を見る
A Delightful Site For Writers And Lovers Of Words And Language It Is All About The Number Zero Its Place In The History Philosophy And World Literatures We Have Heard Of Calling Someone A Total Zero As An Insult But What Does Zero Really Mean This
Source: refractive-index perturbation ...
詳細を見る
Osa Theoretical Analysis Of Mode Conversion By Refractive Index Perturbation Based On A Single Tilted Slot On A Silicon Waveguide
Source: ç - Wiktionary
詳細を見る
C Wiktionary
Source: SciELO
詳細を見る
Magneto Responsive Hydrogels Preparation Characterization Biotechnological And Environmental Applications
Source: https://www.c-span.org/
詳細を見る
Jyryd Papjujqm
Source: nanocomposite coatings ...
詳細を見る
Progress In Biomimetic Leverages For Marine Antifouling Using Nanocomposite Coatings Journal Of Materials Chemistry B Rsc Publishing
Source: home.ubalt.edu
詳細を見る
A Delightful Site For Writers And Lovers Of Words And Language It Is All About The Number Zero Its Place In The History Philosophy And World Literatures We Have Heard Of Calling Someone A Total Zero As An Insult But What Does Zero Really Mean This
Source: z varies directly as x and inversely as ...
詳細を見る
Z Varies Directly As X And Inversely As Y If Z 159 When X 8 And Y 6 Find Z If X 5 And Y 8 Wyzant Ask An Expert
Source: Z - Wiktionary
詳細を見る
Z Wiktionary
Source: A vector field F is given by F =sinyi+x ...
詳細を見る
A Vector Field F Is Given By F Sinyi X 1 Cosy J How Do You Evaluate The Line Integral Integration Over C Vector F Dr Where C Is The Circular Path Given X 2 Y 2 A 2
Source: 2
詳細を見る
Anufdu9m Qii6m
Source: X - Wiktionary
詳細を見る
X Wiktionary
Source: cubic polynomial equations using ...
詳細を見る
Pdf A Simplified Expression For The Solution Of Cubic Polynomial Equations Using Function Evaluation
Source: sorting-in-slovak-and-czech-alphabet ...
詳細を見る
Sorting In Slovak And Czech Alphabet Readme En Md At Master Mesaros Sorting In Slovak And Czech Alphabet Github
Source: ultrafast vector beams ...
詳細を見る
Complete Spatiotemporal And Polarization Characterization Of Ultrafast Vector Beams Communications Physics
Source: Latin alphabet - Wikipedia
詳細を見る
Latin Alphabet Wikipedia